Publications
* denotes equal contribution
An up-to-date list is available on Google Scholar.
2026
-
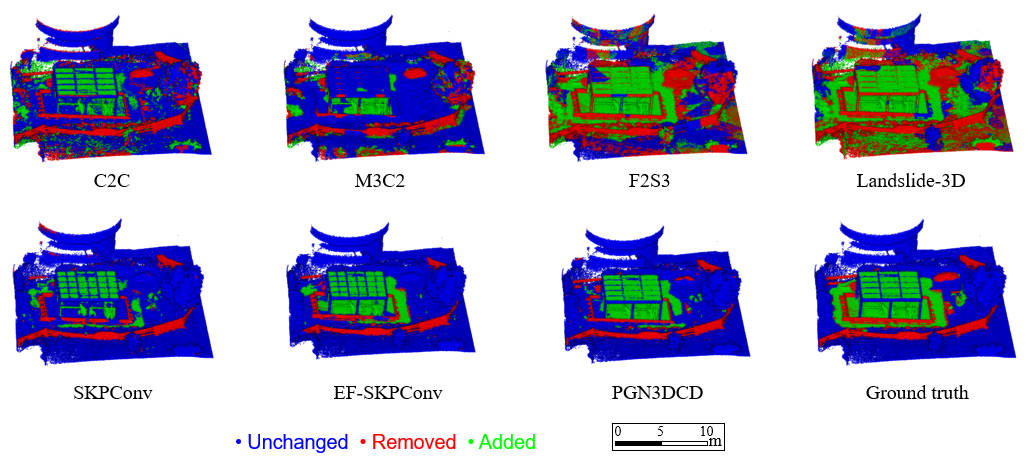 MultiChange3D: A Multi-Scene, Multi-Sensor Dataset for Benchmarking 3D Geometric Change DetectionZhaoyi Wang, Paweł Trybala, Andreas Wieser, and Fabio Remondino2026Accepted by ISPRS Congress 2026
MultiChange3D: A Multi-Scene, Multi-Sensor Dataset for Benchmarking 3D Geometric Change DetectionZhaoyi Wang, Paweł Trybala, Andreas Wieser, and Fabio Remondino2026Accepted by ISPRS Congress 20263D change detection is essential for monitoring infrastructure, environmental dynamics, and natural hazards. However, existing algorithms are often evaluated on single-scene datasets, and their generalization across varied real-world scenes remains largely unexplored due to the absence of a universal benchmark. To address this issue, we propose \textbfMultiChange3D, a multi-scene, multi-sensor 3D change detection dataset for identifying geometric changes in 3D space. The dataset provides registered pairs of point clouds with ground-truth geometric change labels, enabling standardized evaluation across different methods. To demonstrate the use of the \textbfMultiChange3D dataset, we benchmark an initial set of approaches on a subset of the dataset. The evaluated methods include classical Euclidean distance-based methods (C2C, M3C2), 3D displacement estimation-based approaches (F2S3, Landslide-3D), and deep learning-based classification methods (KPConv, EF-KPConv, PGN3DCD). Quantitative and qualitative analyses indicate the strengths and limitations of the evaluated methods, highlighting the challenges in cross-scene generalization under variations in point density, scale, and types of changes.
-
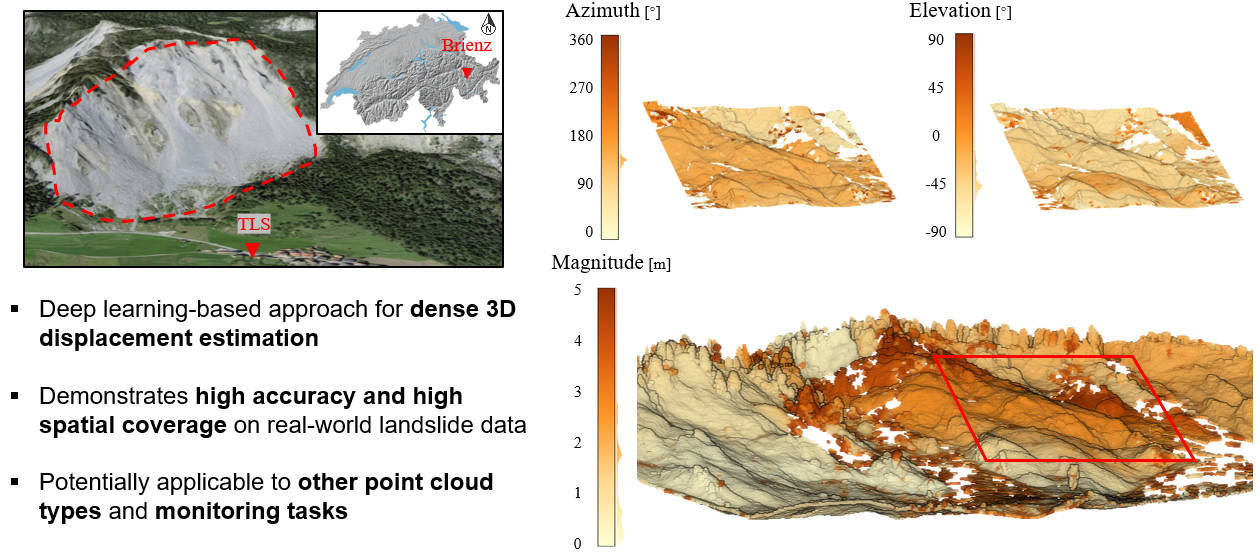 Dense 3D Displacement Estimation for Landslide Monitoring via Fusion of TLS Point Clouds and Embedded RGB ImagesZhaoyi Wang, Jemil Avers Butt, Shengyu Huang, Tomislav Medic, and 1 more authorInternational Journal of Applied Earth Observation and Geoinformation, 2026
Dense 3D Displacement Estimation for Landslide Monitoring via Fusion of TLS Point Clouds and Embedded RGB ImagesZhaoyi Wang, Jemil Avers Butt, Shengyu Huang, Tomislav Medic, and 1 more authorInternational Journal of Applied Earth Observation and Geoinformation, 2026Landslide monitoring is essential for understanding geohazards and mitigating associated risks. Existing point cloud-based methods, however, typically rely on either geometric or radiometric information and often yield sparse or non-3D displacement estimates. In this paper, we propose a hierarchical partitioning-based coarse-to-fine approach that fuses 3D point clouds and co-registered RGB images to estimate dense 3D displacement vector fields. Patch-level matches are constructed using both 3D geometry and 2D image features, refined via geometric consistency checks, and followed by rigid transformation estimation per match. Experimental results on two real-world landslide datasets demonstrate that the proposed method produces 3D displacement estimates with high spatial coverage (79% and 97%) and accuracy. Deviations in displacement magnitude with respect to external measurements (total station or GNSS observations) are 0.15 m and 0.25 m on the two datasets, respectively, and only 0.07 m and 0.20 m compared to manually derived references, all below the mean scan resolutions (0.08 m and 0.30 m). Compared with the state-of-the-art method F2S3, the proposed approach improves spatial coverage while maintaining comparable accuracy. The proposed approach offers a practical and adaptable solution for TLS-based landslide monitoring and is extensible to other types of point clouds and monitoring tasks.
2025
-
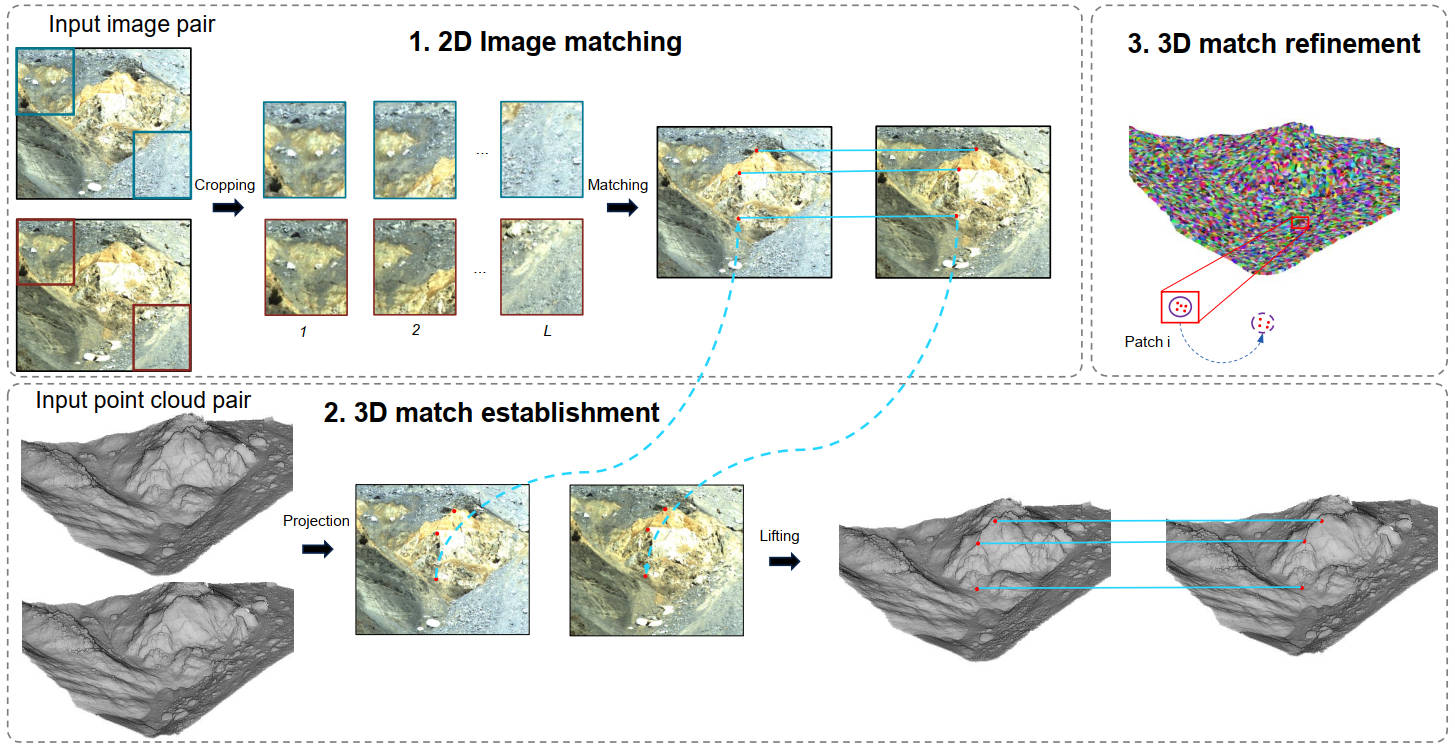 An Approach for RGB-Guided Dense 3D Displacement Estimation in TLS-Based GeomonitoringZhaoyi Wang, Jemil Avers Butt, Shengyu Huang, Nicholas Meyer, and 2 more authorsISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2025
An Approach for RGB-Guided Dense 3D Displacement Estimation in TLS-Based GeomonitoringZhaoyi Wang, Jemil Avers Butt, Shengyu Huang, Nicholas Meyer, and 2 more authorsISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2025Estimating 3D deformation with high spatial resolution from TLS point clouds is beneficial for geomonitoring. Existing methods for this task primarily rely on geometric data. They do not use radiometric information although it is often available as well. This leaves potential for improvement. To address this, we propose an approach that utilizes RGB images—captured by built-in cameras of TLS scanners and co-registered with TLS point clouds—to generate dense 3D displacement vector fields for deformation analysis. Our method comprises three main steps: (1) applying the Efficient-LoFTR algorithm to establish dense 2D pixel correspondences on RGB images across two epochs; (2) projecting 3D points from both epochs onto RGB images and establishing 3D point correspondences by matching the projected pixels with the established 2D correspondences; (3) clustering the point cloud of one epoch and refining the 3D point correspondences within each cluster to produce the final displacement vector fields. Experiments on real measurements obtained from a rockfall simulator and from a real-world landslide demonstrate that our method achieves comparable accuracy to state-of-the-art geometry-based methods, with improved density and computational efficiency. By using radiometric features, our approach complements geometry-based methods, suggesting that combining both will enhance coverage and/or accuracy for geomonitoring applications.
-
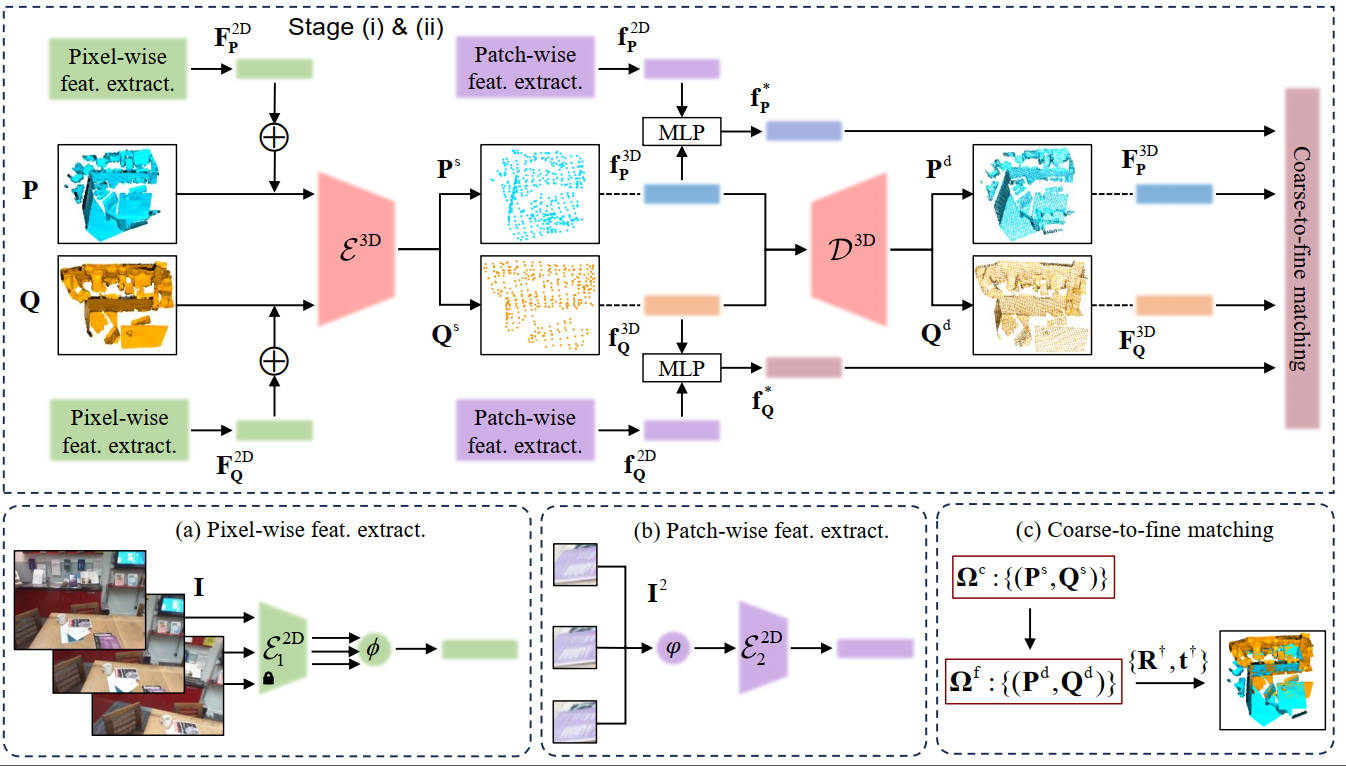 Cross-Modal Feature Fusion for Robust Point Cloud Registration with Ambiguous GeometryZhaoyi Wang, Shengyu Huang, Jemil Avers Butt, Yuanzhou Cai, and 2 more authorsISPRS Journal of Photogrammetry and Remote Sensing, 2025
Cross-Modal Feature Fusion for Robust Point Cloud Registration with Ambiguous GeometryZhaoyi Wang, Shengyu Huang, Jemil Avers Butt, Yuanzhou Cai, and 2 more authorsISPRS Journal of Photogrammetry and Remote Sensing, 2025Point cloud registration has seen significant advancements with the application of deep learning techniques. However, existing approaches often overlook the potential of integrating radiometric information from RGB images. This limitation reduces their effectiveness in aligning point cloud pairs, especially in regions where geometric data alone is insufficient. When used effectively, radiometric information can enhance the registration process by providing context that is missing from purely geometric data. In this paper, we propose CoFF, a novel Cross-modal Feature Fusion method that utilizes both point cloud geometry and RGB images for pairwise point cloud registration. Assuming that the co-registration between point clouds and RGB images is available, CoFF explicitly addresses the challenges where geometric information alone is unclear, such as in regions with symmetric similarity or planar structures, through a two-stage fusion of 3D point cloud features and 2D image features. It incorporates a cross-modal feature fusion module that assigns pixel-wise image features to 3D input point clouds to enhance learned 3D point features, and integrates patch-wise image features with superpoint features to improve the quality of coarse matching. This is followed by a coarse-to-fine matching module that accurately establishes correspondences using the fused features. We extensively evaluate CoFF on four common datasets: 3DMatch, 3DLoMatch, IndoorLRS, and the recently released ScanNet++ datasets. In addition, we assess CoFF on specific subset datasets containing geometrically ambiguous cases. Our experimental results demonstrate that CoFF achieves state-of-the-art registration performance across all benchmarks, including remarkable registration recalls of 95.9% and 81.6% on the widely-used 3DMatch and 3DLoMatch datasets, respectively. CoFF is particularly effective in scenarios with challenging geometric features, provided that RGB images are available and that the overlapping regions exhibit sufficient texture in the RGB images.
2023
-
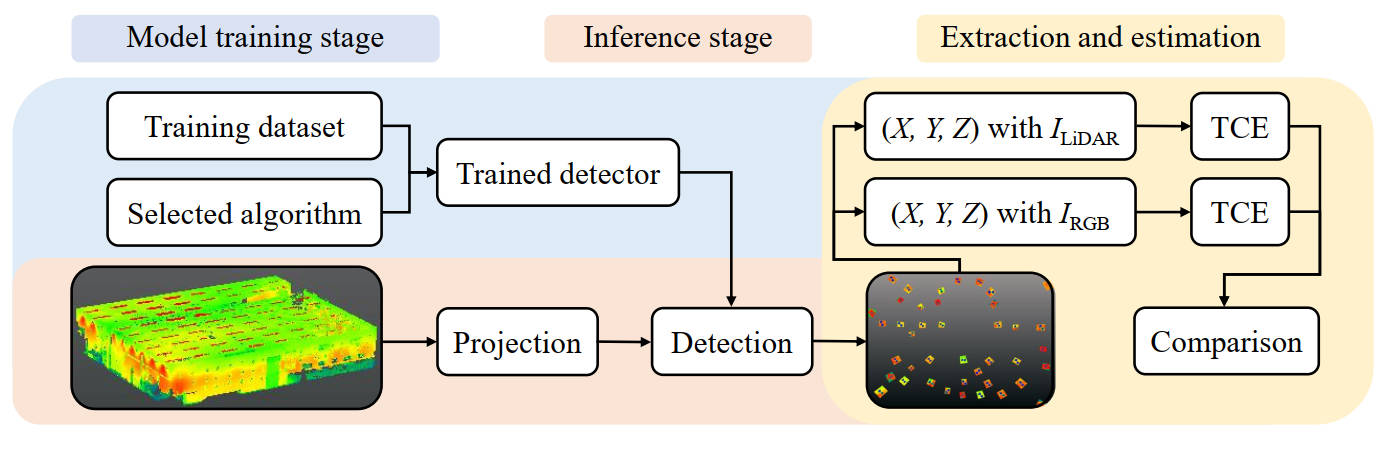 Assessing the Alignment Between Geometry and Colors in TLS Colored Point CloudsZhaoyi Wang, Matej Varga, Tomislav Medic, and Andreas WieserISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2023
Assessing the Alignment Between Geometry and Colors in TLS Colored Point CloudsZhaoyi Wang, Matej Varga, Tomislav Medic, and Andreas WieserISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2023The integration of the color information from RGB cameras with the point cloud geometry is used in numerous applications. However, little attention has been paid on errors that occur when aligning colors to points in terrestrial laser scanning (TLS) point clouds. Such errors may impact the performance of algorithms that utilize colored point clouds. Herein, we propose a procedure for assessing the alignment between the TLS point cloud geometry and colors. The procedure is based upon identifying artificial targets observed in both LiDAR-based point cloud intensity data and camera-based RGB data, and quantifying the quality of the alignment using differences between the target center coordinates estimated separately from these two data sources. Experimental results with eight scanners show that the quality of the alignment depends on the scanner, the software used for colorizing the point clouds, and may change with changing environmental conditions. While we found the effects of misalignment to be negligible for some scanners, they exhibited clearly systematic patterns exceeding the beam divergence, image and scan resolution for four of the scanners. The maximum deviations were about 2 mrad perpendicular to the line-of-sight when colorizing the point clouds with the respective manufacturer’s software or scanner in-built functions, while they were up to about 5 mrad when using a different software. Testing the alignment quality, e.g., using the approach presented herein, is thus important for applications requiring accurate alignment of the RGB colors with the point cloud geometry.
- Error Analysis and Application of Laser Tracker’s Bundle Adjustment in the Tunnel Alignment Measurement of Particle AcceleratorTao Luo, Xiaoye He, Zhaoyi Wang, Wei Wang, and 11 more authorsGeomatics and Information Science of Wuhan University, 2023
The control network in accelerator alignment often forms a straight line or ring. The errors will accumulate as the number of stations increases when performing lap measurements with the laser tracker. To improve the measurement accuracy of the laser tracker control network, we analyze the source of errors and compare four different measurement methods. First, the formulas of error propagation in the bundle adjustment method are derived and the error source of the unknown points is analyzed. Second, the following four schemes are obtained by adopting the bundle adjustment method of laser trackers. Finally, the performances of the above schemes are analyzed in the experiment of bundle adjustment. The results show that the absolute position accuracy for the scheme with fixed position and orientation is the highest among the four schemes. The average root mean square (RMS) of the position is 0.147 mm in the experiment of the closed measurement, which is less than that of the unclosed measurement with the RMS of 0.163 mm. In the measurement range of 15 m × 10 m × 3 m, the orientation of the non-fixed scheme flat-rate solution and the average RMS of the plane position are 3.58 s and 0.144 mm, respectively. The station closure can enhance the constraint. Besides, the fixed station center position can effectively inhibit the error accumulation of multi-station lap measurement, improving the accuracy of the network adjustment. Moreover, the result of fixed station center position is better than that of the fixed station center orientation, which indicates that the station positions are vital parameters that affect the two-dimensional bundle adjustment of the laser tracker. This paper can provide a reference for the design of the high-precision laser tracker bundle adjustment method.
2021
- High precision pre-alignment method based on laser trackerZhaoyi Wang, Xiaoye He, Wei Wang, Haiting Zhang, and 2 more authorsGeomatics and Information Science of Wuhan University, 2021
Higher accuracy is needed for the alignment and installation of key components in new generation particle accelerators. However, the existing measuring instruments are limited by the technological development, it is difficult to significantly improve the measurement accuracy in a short time. In this paper, we proposed a novel pre-alignment method based on 3D trilateration network adjustment of laser trackers. Firstly, we established multiple survey stations surrounding the component which needs to be pre-aligned. Then, we utilized only distance observations between station points and location points to establish 3D trilateration network. Finally, we regarded all coordinates of both station points and location points as unknown parameters, and adopted a 3D free trilateration network adjustment. Experimental results show that the root mean squared error (RMSE) of location points calculated by 3D triangulateration are three times higher than that calculated by 3D trilateration. In addition, the average RMSE of location points can reach the highest precision as 8.9 μm by establishing 22 survey stations. Because the precision is no-more-than 10 μm by establishing 12 survey stations, we consider 12 as the quantity of locally optimal survey stations. This method can provide crucial engineering values for the practical work during the high-precision alignment and installation of devices.
2020
- Fixing positions and orientations of laser trackers during bundle adjustment in multi-station measurementsZhaoyi Wang, Tao Luo, Wei Wang, Qingqing Huang, and 1 more authorMeasurement Science and Technology, 2020
The accumulated errors in multi-station measurements make it challenging to meet higher precision requirements for annular or straight tunnel measurements in the accelerator alignment field. In this paper, a study on fixing positions and orientations of laser trackers during the bundle adjustment is presented. First, we adopt the mixed least squares-total least squares algorithm to calculate the spatial-transformation parameters. Then, according to the principle of bundle adjustment based on laser trackers, we design four schemes and compare them to determine which scheme results in the highest precision. Experimental results show that fixing each station’s position and orientation can considerably decrease the absolute point errors from 0.130 to 0.069 mm within 15 m × 10 m × 3 m, and fixing stations’ orientations is better than fixing their positions. This research can derive high-precision schemes that effectively reduce accumulated errors in annular or straight tunnel measurements, and it can apply to other robotic sensors as well.